体素泛化ICP算法用于快速准确的点云配准
标题: Voxelized GICP for Fast and Accurate 3D Point Cloud Registration作者: Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno机构:National Institute of Advanced Industrial Science and Technology, Tsukuba, Japan来源: arXiv
编译: 周朋伟审核: 杨杨,wycCode: github: https://github.com/SMRT-AIST/fast_gicp这是泡泡图灵智库推送的第635篇文章,欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权。
摘要
本文提出了一种用于快速准确的三维点云配准算法体素泛化ICP。该方法将体素化思想扩展到广义迭代最近邻GICP中,以避免高昂的最近邻搜索,同时达到较高精度。与通过空间点位置计算体素分布的正态分布变换NDT方法相比。该方法聚合每个点的分布来估计体素分布。这样做的目的是便于并行处理优化,该方法可以在CPU中以30Hz或GPU中以120Hz的频率处理包含15,000数量的点云数据。通过对模拟数据和真实环境的测试,所提出的方法与GICP的精度相当,但速度优于现有方法。这使得开发实时的,极快位姿估计变换的3D LiDAR应用成为可能。
背景与贡献
三维点云配准是标定、定位、建图和环境重建的等任务中的关键任务。有两种主流的点云配准方法: 广义迭代最近邻方法GICP和正态分布变换NDT方法。GICP算法扩展了经典的ICP算法,通过计算分布到分布的形式提高了配准精度。NDT利用体素化方法避免高昂的最近邻搜索,提高处理速度。由于GICP和其他ICP算法的变种均依赖于最近邻搜索,这使得很难在计算资源受限的计算机中实时的处理大量点云数据。而NDT通常对体素的分辨率大小非常敏感。最佳的体素分辨率取决于环境和传感器属性,如果选择不当的分辨率,则NDT的精度将大幅降低。本文的通过聚合每个体素内所有点的分布,使得体素化的过程更为鲁棒。相比于NDT从点的空间位置估计体素的分布,本文的体素化方法即使体素中有很少的点,也能够产生有效的体素分布。这也使得算法对体素分辨率的改变更加鲁棒。本文的主要贡献如下:
我们提出了一种多点分布聚合方法,使得估计较少数量点的体素分布更为鲁棒。我们提出了VGICP算法达到了GICP的精度,但是比现有方法速度更快。我们开源了新提出的VGICP算法,其可以像GCIP算法的一样可以并行处理。方法
GICP算法我们首先回顾一下GICP算法,记源点云为,其中每个点服从高斯分布。目标点云为,其中每个点同样服从高斯分布。因此,我们可以通过变换矩阵两个集合之间对应点的误差为
 的分布可以通过高斯分布的变换性质的得出如下
的分布可以通过高斯分布的变换性质的得出如下 GICP算法通过最大化似然概率求解变换
GICP算法通过最大化似然概率求解变换 通过使用替换协方差矩阵的特征值完成正则化,这使得GICP算法可以看做成plane-to-plane ICP。VGICP算法
通过使用替换协方差矩阵的特征值完成正则化,这使得GICP算法可以看做成plane-to-plane ICP。VGICP算法为了能够推到出VGICP算法,我们首先对式1进行扩展,使得其可以计算点到其邻近点集$\left\{b_{j} \mid\left\|a_{i}-b_{j}\right\|<r\right\}$的距离, 如下:< p>
上式可以解释为平滑目标点的分布,的分布如下:
 为了能够估计变换,同样需要求解式7的最大化似然概率
为了能够估计变换,同样需要求解式7的最大化似然概率
为了能够高效的计算上式,将其修改成: 其中是临近点的数量。通过临近点集均值分布,上述损失函数可以高效的完成计算。我们可以通过存储每个体素的使得上式可以直接完成体素级的计算。
其中是临近点的数量。通过临近点集均值分布,上述损失函数可以高效的完成计算。我们可以通过存储每个体素的使得上式可以直接完成体素级的计算。
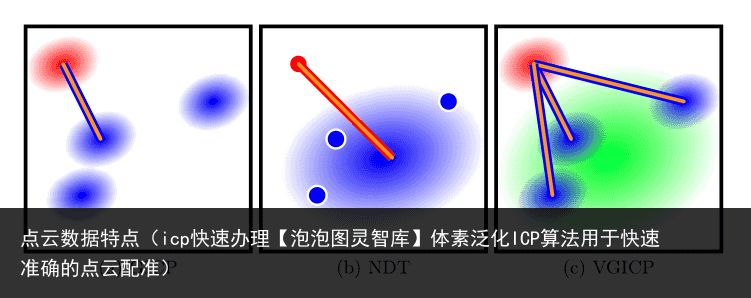
图2给出了对应点距离计算的示意图,红色圆表示源点云,蓝色表示目标点云。GICP计算单分布到单分布的差异,NDT计算点到分布的差异。VGICP计算单分布到多分布的差异。即使体素中仅包含很少数量点,VGICP的模型也可会产生有效的分布。
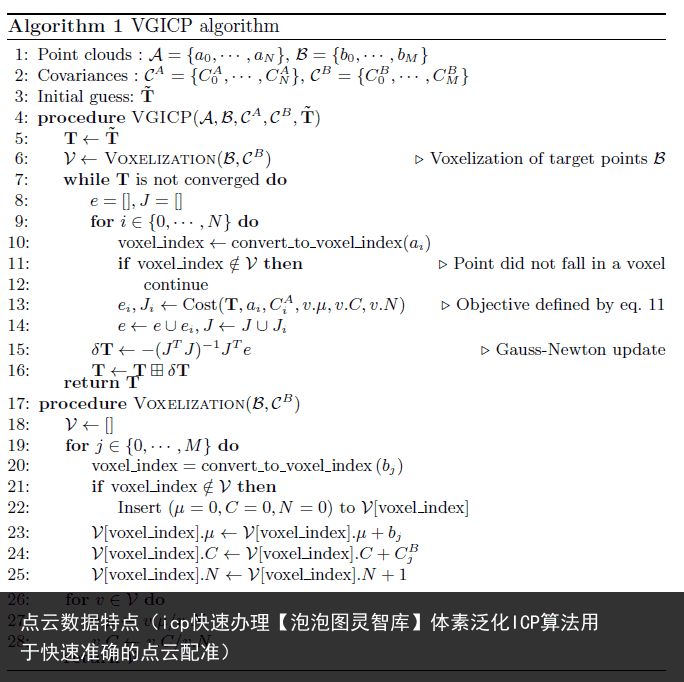
算法的主要流程如下
 实验对比
实验对比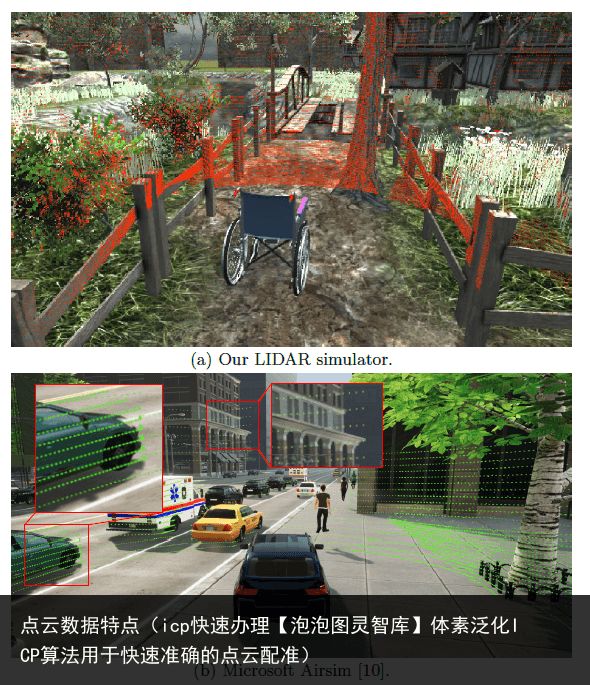
图3 利用模拟器和Microsoft AirSim生成的点云数据。
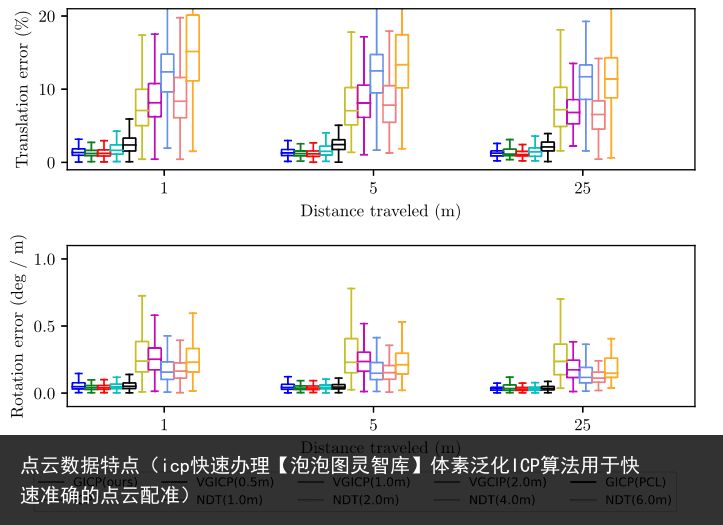
图4 展示了不同算法的绝对误差和相对误差。
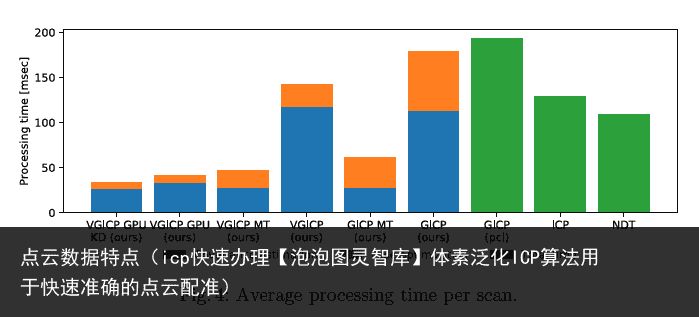
图5 作者实验的不同算法和PCL库中不同算法的运行时间对比
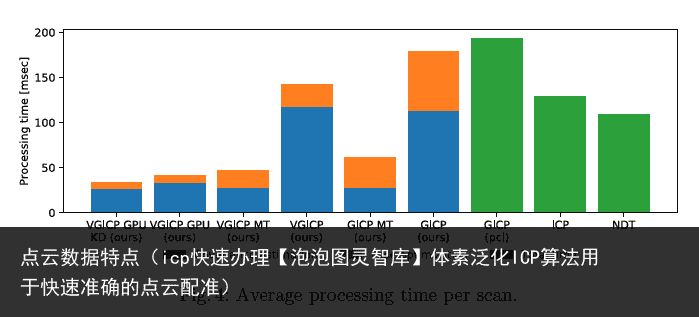
图6 室外实验中不同算法的精度对比
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文, 即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系paopaorobot@163.com